A CoRL 2026 submission on VLM-guided reward compilation for VLA policies.
VLA Models / Reinforcement Learning / Tactile World-Action Models
Haodi (Woody) Hu
Ph.D. graduate from the University of Southern California currently focused on vision-language-action models, tactile-grounded world-action models, reinforcement learning, and dexterous manipulation systems for robust embodied autonomy.
I am currently a Senior Machine Learning Engineer at Sandisk. Previously, as a Research Scientist Intern at MERL, I developed ReCoVLA for VLM-guided residual RL recovery and TacSushi for tactile-grounded world-action control with a dexterous hand. My broader research grew out of USC RoboLAND and spans robot learning, embodied reasoning, granular loco-manipulation, and multi-robot coordination, where I worked with Professor Feifei Qian and collaborated with Professor Daniel Seita.
Dexterous hand manipulation, tactile prediction, risk-constrained control, and policy adaptation.

Research Direction
Building VLA, tactile world-action models, and RL systems for robot manipulation
My current research connects language-conditioned robot policies, reinforcement learning, and tactile-grounded world-action modeling for manipulation in unstructured settings, spanning long-horizon mobile autonomy and contact-rich dexterous hands.
Core areas
Vision-Language-Action Models
Reinforcement Learning
Mobile Manipulation
Tactile World-Action Models
Long-Horizon Manipulation
Robot Learning
Embodied Reasoning
Policy Adaptation
Multi-Robot Systems
Current role and trajectory
- 2026 Joined Sandisk as a Senior Machine Learning Engineer working on RL optimization and VLM post-training.
- May 2026 Submitted ReCoVLA, a VLM-guided reward compilation framework for VLA policies, to CoRL 2026.
- Jan-Jun 2026 Research Scientist Intern at MERL focusing on VLA recovery, reinforcement learning, and tactile-grounded world-action models.
- Aug 2025 Paper accepted to the 9th Conference on Robot Learning: Granular Loco-manipulation.
- Summer 2025 Machine Learning Engineer intern in the Data Science group at SanDisk.
Selected Publications
Recent projects, papers, and videos
Recent work across VLA models, reinforcement learning for manipulation, dexterous tactile manipulation, granular loco-manipulation, obstacle-aided navigation, and multi-robot systems.
Spotlight paper
ReCoVLA: VLM-Guided Reward Compilation for Failure Recovery in Vision-Language-Action Policies
A VLA/RL framework that keeps the base policy frozen, uses Qwen3-VL to infer structured task context, and compiles stage-gated rewards. ReCoVLA improved simulation success from 36.7% to 66.7% and achieved 61.7% success on a physical Fetch robot.
TacSushi: Learning Sushi Making with a Dexterous Tactile Manipulator and World Models
A tactile dexterous manipulation project that combines fingertip force sensing, Shadow Hand teleoperation, and world-model learning for deformable sushi-making skills, with highlights on contact-rich perception, soft ingredient handling, and long-horizon manipulation primitives.
Granular Loco-manipulation: Repositioning Rocks Through Strategic Sand Avalanche
A research direction in which legged robots use learned models of granular dynamics to reshape terrain and indirectly manipulate obstacles.
Learning Granular Media Avalanche Behavior for Indirectly Manipulating Obstacles on a Granular Slope
A learning-based framework for predicting granular avalanche behavior to support indirect manipulation on sandy slopes.
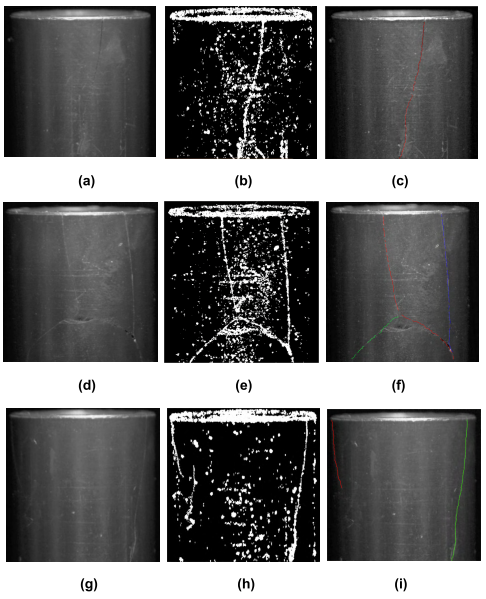
Method for Detecting Micron Cracks on a Magnetic Rotor Surface Based on a Support Vector Machine
Teaching, Mentoring, and Service
Academic activities beyond publications
The new structure makes this material easier to scan than a long text block, while still preserving the substance from your current site.
Teaching experience
- Robot Mobility (EE599) — Teaching Assistant, Fall 2022
- A Computational Introduction to Deep Learning (EE541) — Teaching Assistant, Spring 2023, Fall 2023, Spring 2024
- MOS VLSI Circuit Design (EE477L) — Teaching Assistant, Fall 2024, Spring 2025
Awards and service
- IEEE Access Exceptional Reviewer Recognition, 2026
- USC Viterbi CURVE Mentor Award, 2022–2025
- USC Viterbi Ph.D. Student Fellowship Award, 2021
- NEFU Excellent Graduates Award, 2019
- Workshop co-organizer for ICRA 2025 deformable objects workshop
Mentoring
- Supervised students including Luke Cortez, Jerry Wu, Seojoon Kwon, Tian Xie, and Brendon Lee.
- Served as Ph.D. mentor in the USC CURVE program across multiple cohorts from 2022 to 2025.
- Supported student researchers through project mentorship and conference preparation.